
Initial problem
Around the world, seabeds are being unknowingly destroyed by the global shipping industry. Anchors drag across the ocean floor and rip up vast amounts of marine living spaces. It is our goal to find a modern solution for this problem.
The Issue
NA 1

eco-friendly
safe
autonomous
easy to use
contemporary
reliable
This Project was made by

Jan Martinov
Dominik Hahn
.png)
Jan Klause
Jambo Anker is a German anchor manufacturer. As a part of the anchoring industry, they helped us gain a deeper understanding of anchor development and design.
Interview with Jambo Anker

Different Methods
.png)
.png)
By anchoring incorrectly the natural wildlife of the ocean floor is heavily damaged. The healing process for such damage can take many years.
Incorrect Anchoring
Testing
Screwing in
The screw variant proved effective due to its ability to easily dig into sand, however sand could easily enter the motor, thus causing issues. Therefore, this design proved to be lacklustre.

Bucket Suction
We took inspiration from bucket suction methods used in rig mooring systems. After testing it proved to be a reliable method for our use case.

Air pressure
After testing an air pressure anchoring system, we found the method stirs up too much sand and is to imprecise for our needs.


Destruction of seabed

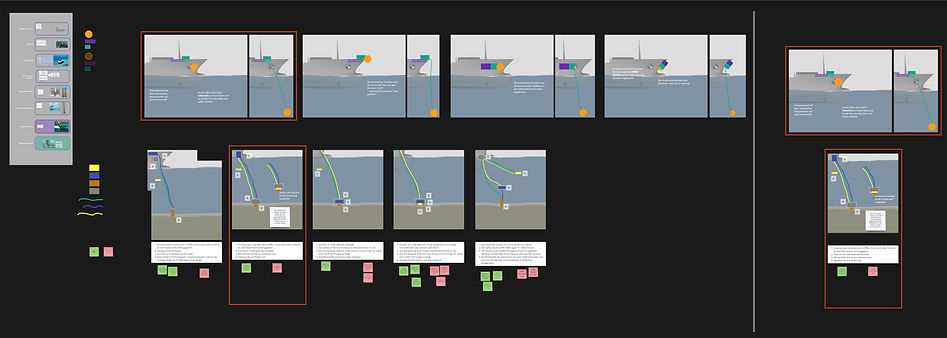
Releasing the anchor during anchoring

Oil spills caused by anchor dragging

Floor mounting
Early in production development, we realised the two leading factors of ocean bed erosion are the anchor ground attachment mechanism and the anchor chain. Therefore, we found a more sustainable way of anchoring to the ground. We also managed to eliminate the chain from the anchoring process.

Sensors / finding the anchor point
We equipped our anchor design with multiple sensors. An inbuilt drone will then use these sensors to locate the best anchoring location. To properly implement this system, we had to first inform ourselves about the varying types of sensors that could be used for such a task.

Movement in water
Optimal movement underwater was another challenge we faced during development. After vigorous planning, we found a way to make our anchor move as efficiently as possible.
Component Drone
Sally Watson is a Doctor of Philosophy and Marine geology and geophysics at the University of Aukland. She also works for the National Institute of Water and Atmospheric Research NIWA, specializing in ocean geology.
Her insight into the topic was instrumental to overcome the first hurdles of our project. She helped us get a more complete picture of the issue we were trying to solve, while also providing us with valuable knowledge for our research.
Interview with Dr.Sally Watson

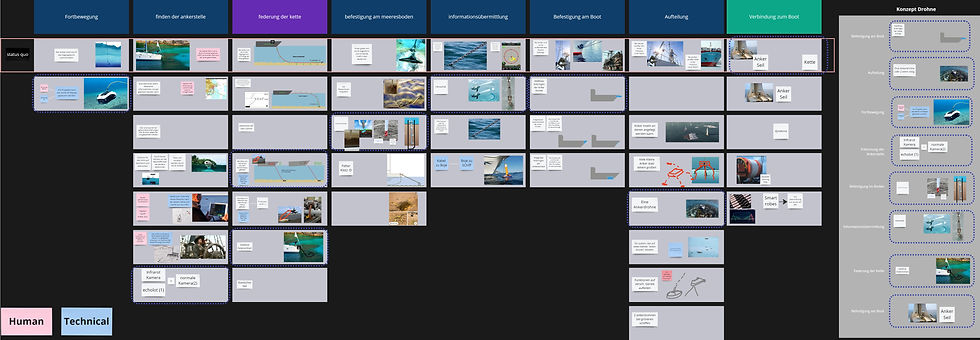
By bringing together different concepts, we were able to create a morphological box. We used this method to visualize and coordinate our concepts.
Morphological box
.jpg)
.png)
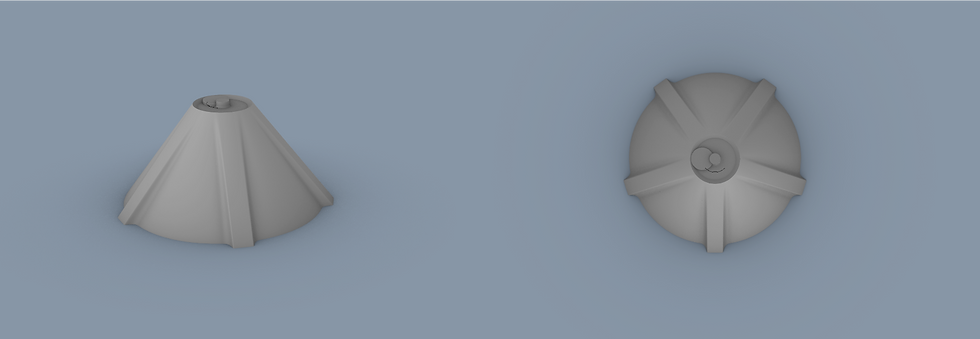
second drone design
.png)
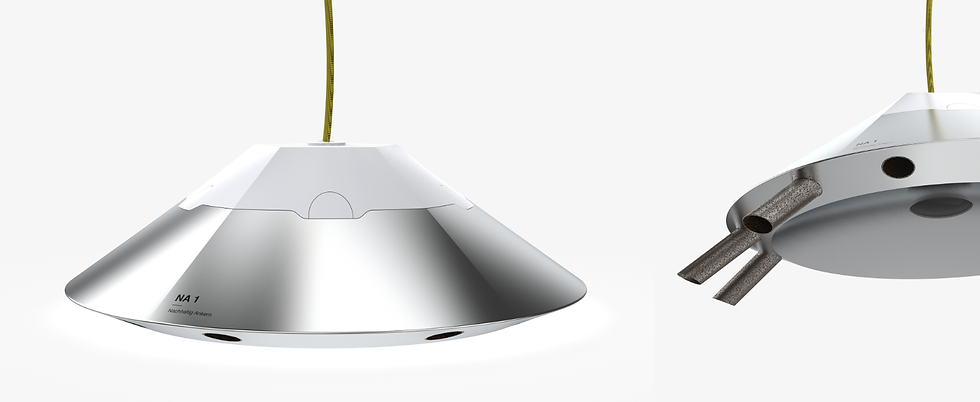
Final Drone Design
.png)
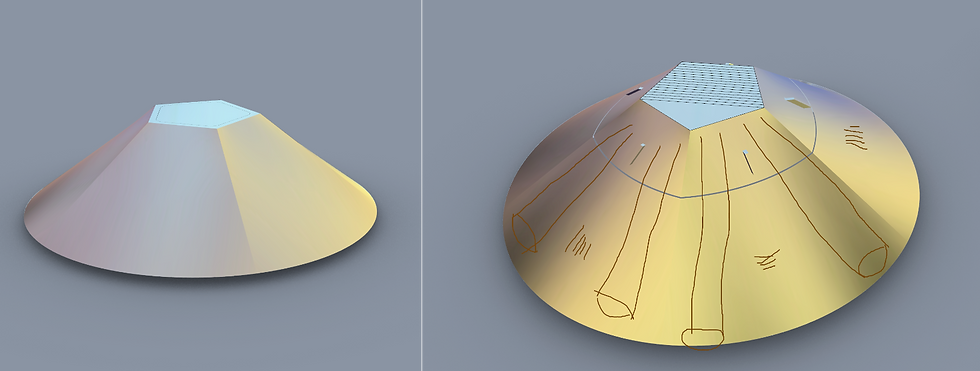
Initial drone design
.jpg)